1 Introduction
With the improvement of the quality of life, home intelligence has become a mainstream in the current era. How to better design the overall control of smart homes is becoming more and more important. Thanks to the rapid development of ARM and touch screen, it is possible to implement a friendly interface control with a better GUI. At the same time, thanks to the wide application of zigbee infinite transmission technology, by designing zigbee's protocol networking, ARM can easily pass the serial port driver. The program realizes the control of the smart home; at the same time, through the ARM learning the identification code of the universal remote control, the ARM multi-function application on the smart home and the integrated control of the smart home are realized.
2 System Design Overview
The block diagram of the design based on the embedded smart home is shown in Figure 1. It mainly includes the following parts. Qt/E and linux systems, ARM9 microprocessors, zigbee modules, voice modules, GSM modules, serial and network modules, and universal remotes.
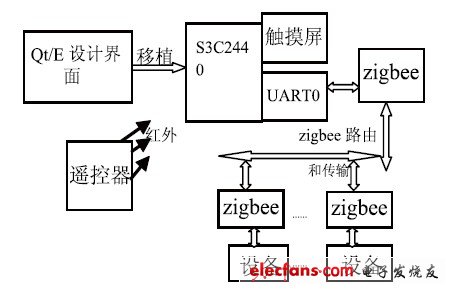
Figure 1 Smart home design block diagram
ARM9 microprocessor uses Samsung S3C2440 CPU development board, the system chooses embedded linux system, its kernel uses 2.6.25.8 kernel, nandflash uses 256M memory. And because the arm core integrates the drivers of various peripheral control modules, it needs to be cut as necessary, and the serial port is used to connect the zigbee module.
Zigbee uses TI's CC24430 radio frequency chip. Zigbee has significant low-cost, low-consumption, multi-network wireless transmission functions, so you can use a zigbee as a route to transmit zigbee to multiple zigbees. The networking also effectively extends the transmission distance of zigbee.
The network module uses the CS8900A to connect to the router for remote login.
3 system software design and implementation
The system uses linux as the operating system. Firstly, based on Qt/Embedded, the graphical interface is designed. Then the cross-compilation environment is built on the host machine, and the yaffs operating system is created. Finally, the embedded linux system is transplanted to the ARM9 development board. The system realizes the integrated control of the smart home through the touch screen by designing the GUI interface [1]. The software part of the article includes the transplantation of embedded linux operating system, system interface design, serial port driver and zigbee networking design.
In the transmission process of ARM9 and zigbee, there is a unit-end interface setting of the smart home. In order to distinguish between transmissions between different homes, ARM9 will first have a host ID number setting for each family. In the intelligent control of a home, three ports are designed for the zigbee of the routing function, each port has an ID number, and then the zigbee of the remaining connection routes respectively transmit information by accepting the respective ID numbers, and finally, these zigbees are respectively Set the respective device number, which removes interference and enables individual control of the smart home.
3.1 Touch screen and Qt/Embedded cross-compilation environment
The Linux system migration is required before the cross-compilation environment is established. The Linux system migration mainly includes BootLoad porting, kernel porting and cropping, and file system porting [2]. The article uses u-boot as the BootLload bootloader. The Linux kernel is easy to port and tailor due to its openness. File system This uses the yaffs root file system.
The establishment of a touch screen and Qt/Embedded cross-compilation environment is a key part of the Linux system migration. The steps are as follows.
The first step is to perform touch screen calibration. The design uses TIslib-1.4 as the correction for the touch screen. It is divided into two steps: (1) compile TIslib to generate a correction file. (2) Download the calibration file and the library file to the arm board to achieve five-point calibration. The compilation process is as follows.

The second step is cross-compilation of Qt/E. Qt/E is designed to use qt-embedded-linux-opensource-src-4.5.0. In order to facilitate program development, X86 and ARM versions need to be installed.
First use x86 version and qvfb development on the PC, and then use ARM cross-compilation to run on the development version. So you need to extract it first, then rename it to qt-embedded-linux-opensource-src-4.5.0-x86; decompress it again and rename it to qt-embedded-linux-opensource-src-4.5.0-arm.Qt The compilation process for /E is as follows.

Finally, set the cross-compilation environment variable and enter the system control platform vi /etc/profile. Write the environment variables as follows:

MOSO provides a wide range of IP67 Outdoor LED Driver supporting 0-10V, PWM, resistor and DALI dimming from 25W to 320W. All MOSO led driver for street lighting use aluminum metal case and are fully glue-potted for good dissipation. Surge protection is also built in outdoor led driver to protect street lights from lightning.


To meet different demand from different market, MOSO developed several series outdoor led driver supporting 108-305Vac, 90-305Vac, 249-528Vac different input ranges and got global certificates like CE, TUV, UL, ENEC, SAA, BIS, KC, etc..
MOSO has set several distributors in Europe, United States, Latin America, Asia and Australia. All MOSO outdoor led driver provide 5 years global warranty. In case of any failure, customers can get replacement either from MOSO directly or any one of MOSO distributors.
MOSO always dedicates to providing professional outdoor lighting solutions. Please feel free to contact our sales team if you need any support!
Street Light LED Driver,Outdoor LED Driver,Waterproof Street Light LED Driver,Quality Street Light LED Driver
Moso Electronics , https://www.mosoleddriver.com